Bu yazımda linux makinanızın bilgisayar adını geçici ve kalıcı olarak değiştirmeden bahsedeceğim.
Geçici olarak bilgisayar adı (hostname) değiştirme:
sudo hostname "BilgisayariminYeniAdi"
Bu kadar basit. 🙂 Yalnız buradaki değişikliğin bilgisayarınızın yeniden başlatılana kadar geçerli olacağını unutmayın.
Kalıcı olarak bilgisayar adı (hostname) değiştirme:
bilgisayar adını kalıcı olarak değiştirme için iki yerde değişiklik yapmamız gerekiyor. Bu yerler:
/etc/hosts
/etc/hostname
sudo vim /etc/hostname
hostname dosyası
Son olarak /etc/hosts dosyamızı da değiştirelim. Burada iki dosyaya da aynı ismi vermeyi unutmayın. Yoksa “unable to resolve host” hatasıyla karşılaşabilirsiniz.
sudo vim /etc/hosts
hosts dosyası içeriği
Favori text editörünüzle yukarıdaki yerleri açarak istediğiniz adı girip kaydedin. PC’nizi yeniden başlattığınızda bilgisayar adınız değişmiş olacaktır.
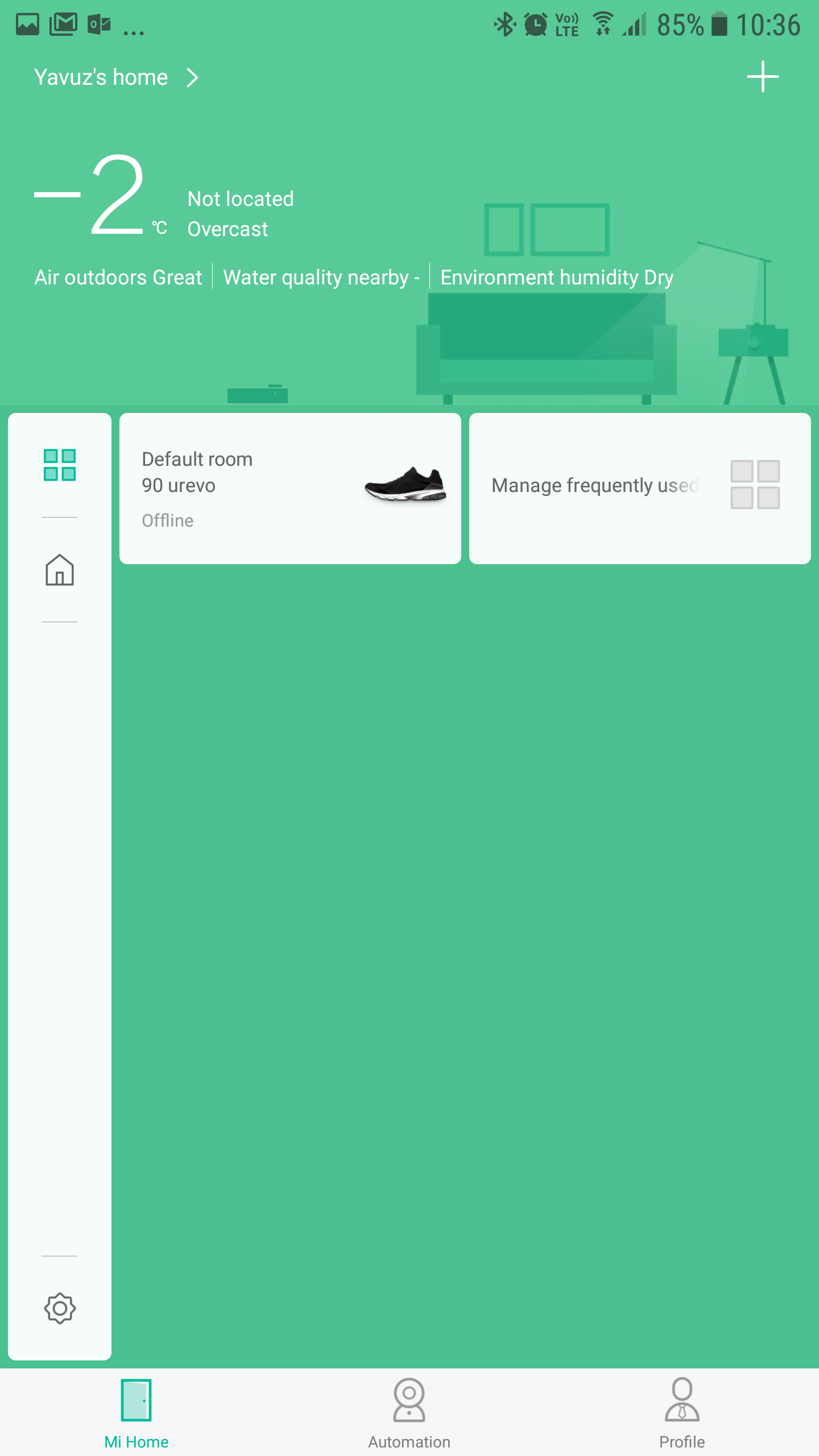
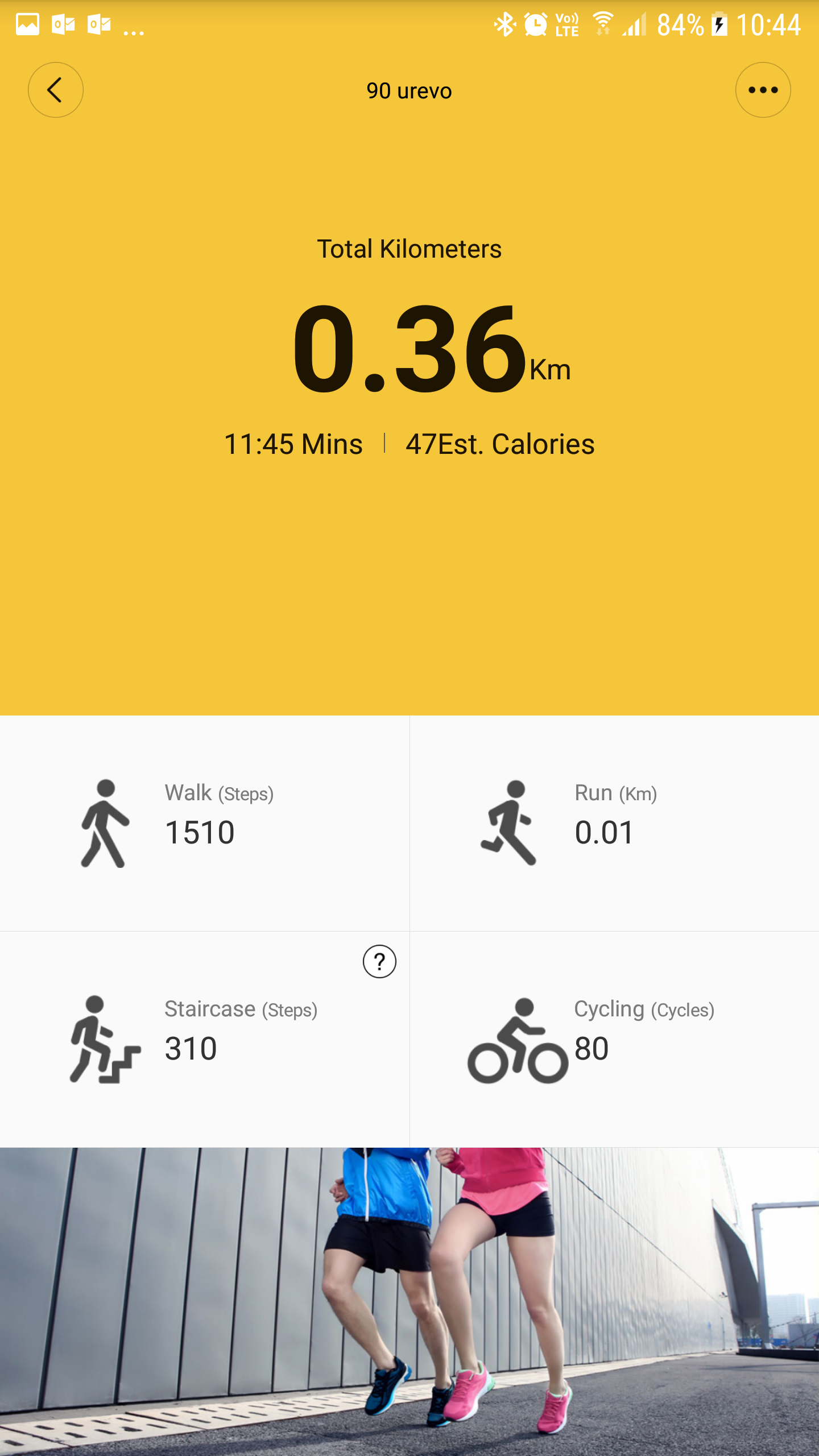
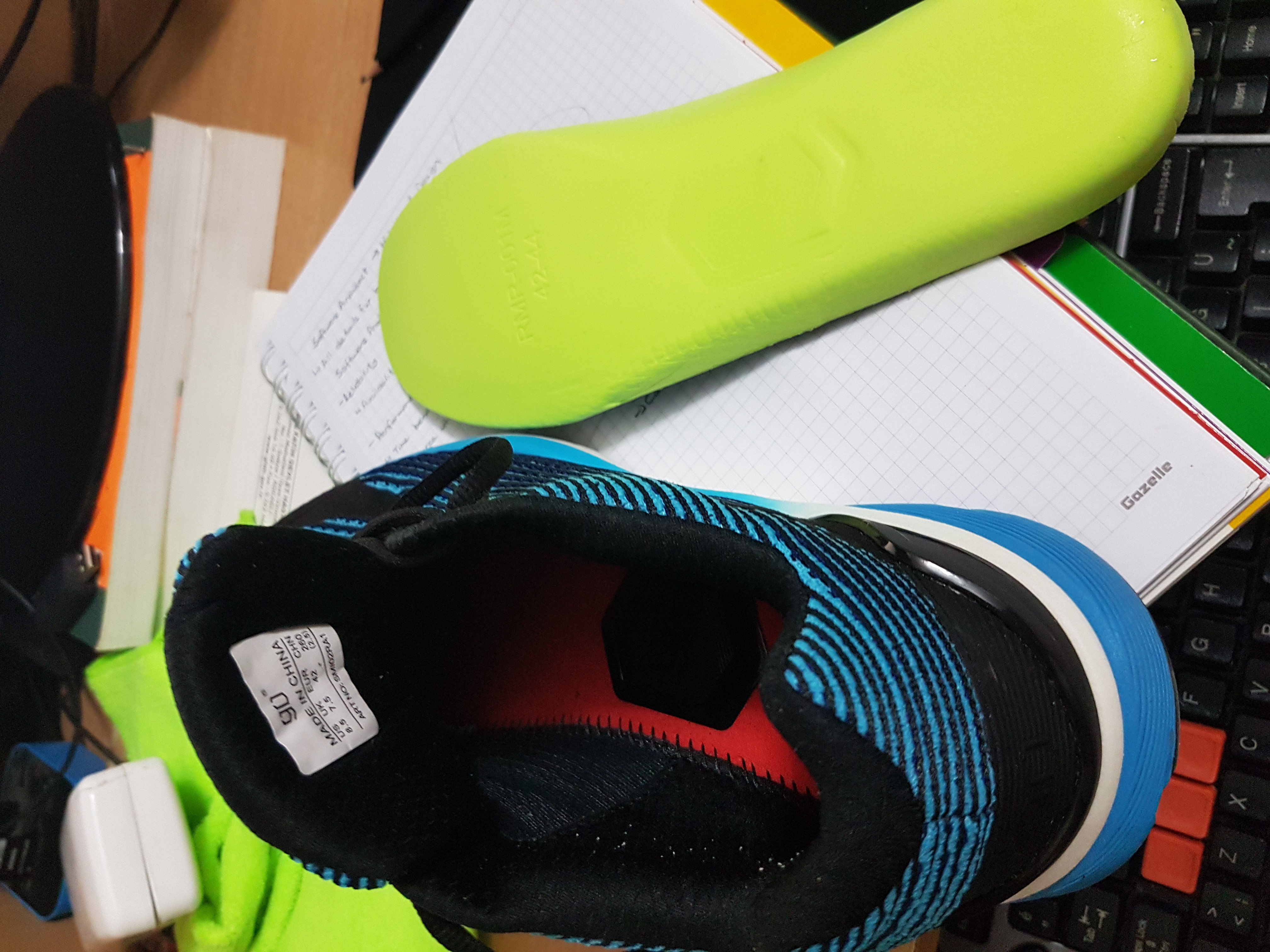
Yakın zamanda hepsiburada.com üzerinden Xiaomi 90 Ultra Fun koşu ayakkabısı aldım. Google Play üzerinden Xiaomi Home uygulamasını indirdim. Üyelik oluşturdum. Ancak cihazı bir türlü ekleyemedim. Eğer siz de bu sorunla karşılaştıysanız buyrun çözüm aşağıda:
Üyeliğimiz varsa giriş yapalım. Yoksa yeni üyelik oluşturalım.
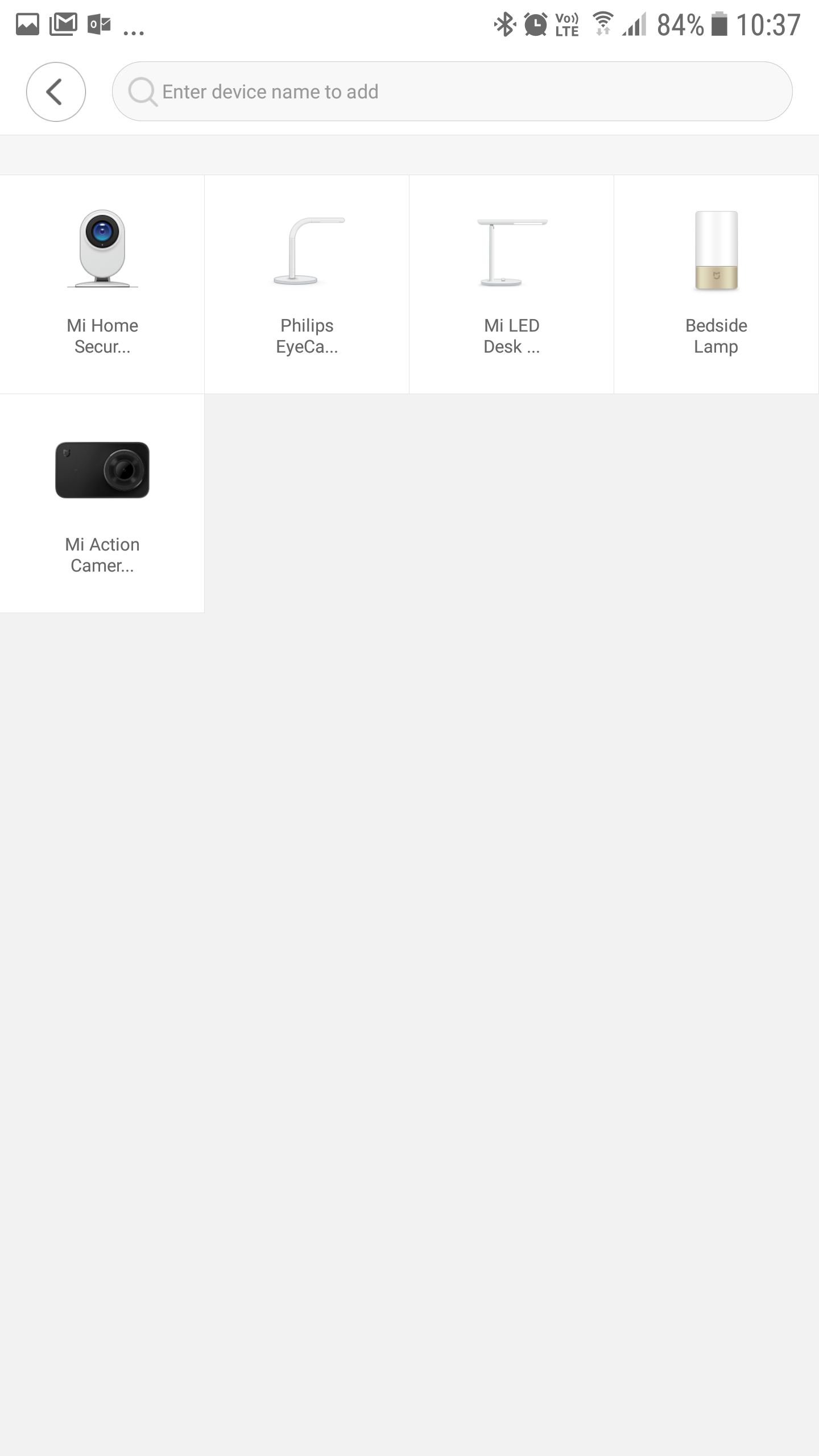
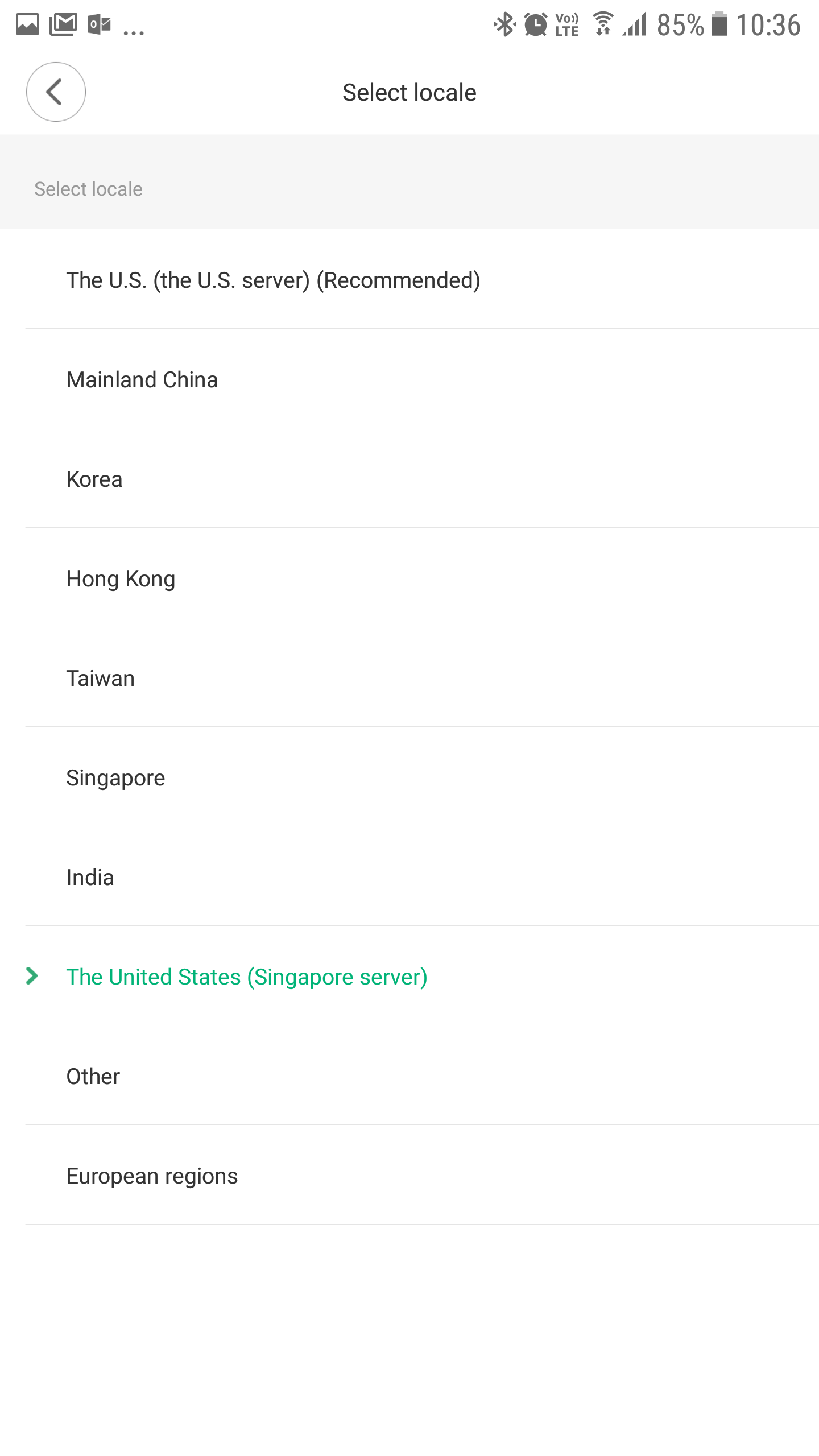
Hesabımızı onaylayıp giriş yaptıktan cihaz ekleme’ye basalım. Bu kısım önemli – açılan ekranda 90 urevo listelenmiyorsa yanlış serverdasınız demektir. Şimdi server ayarlarımızı değiştirelim.
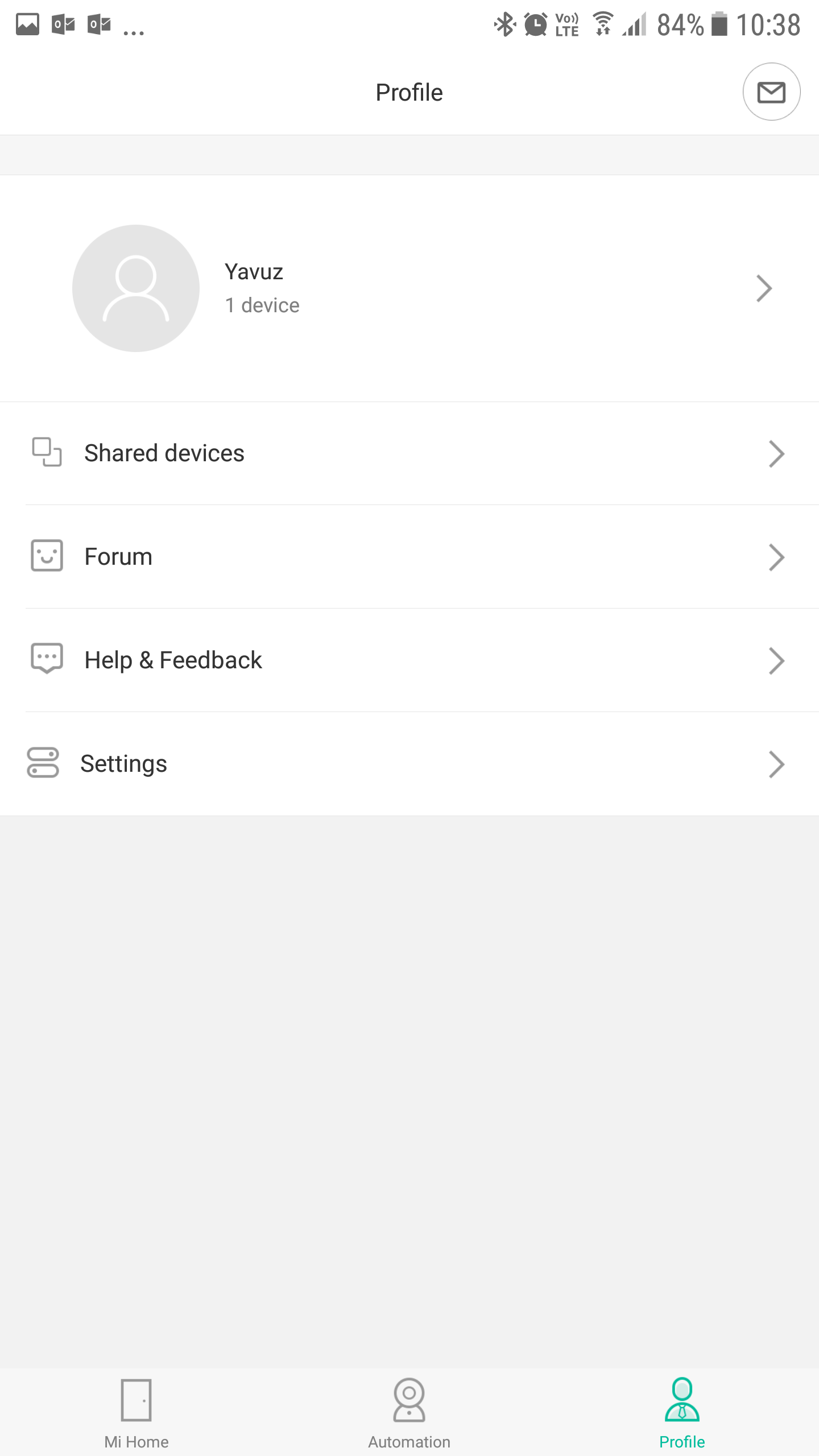
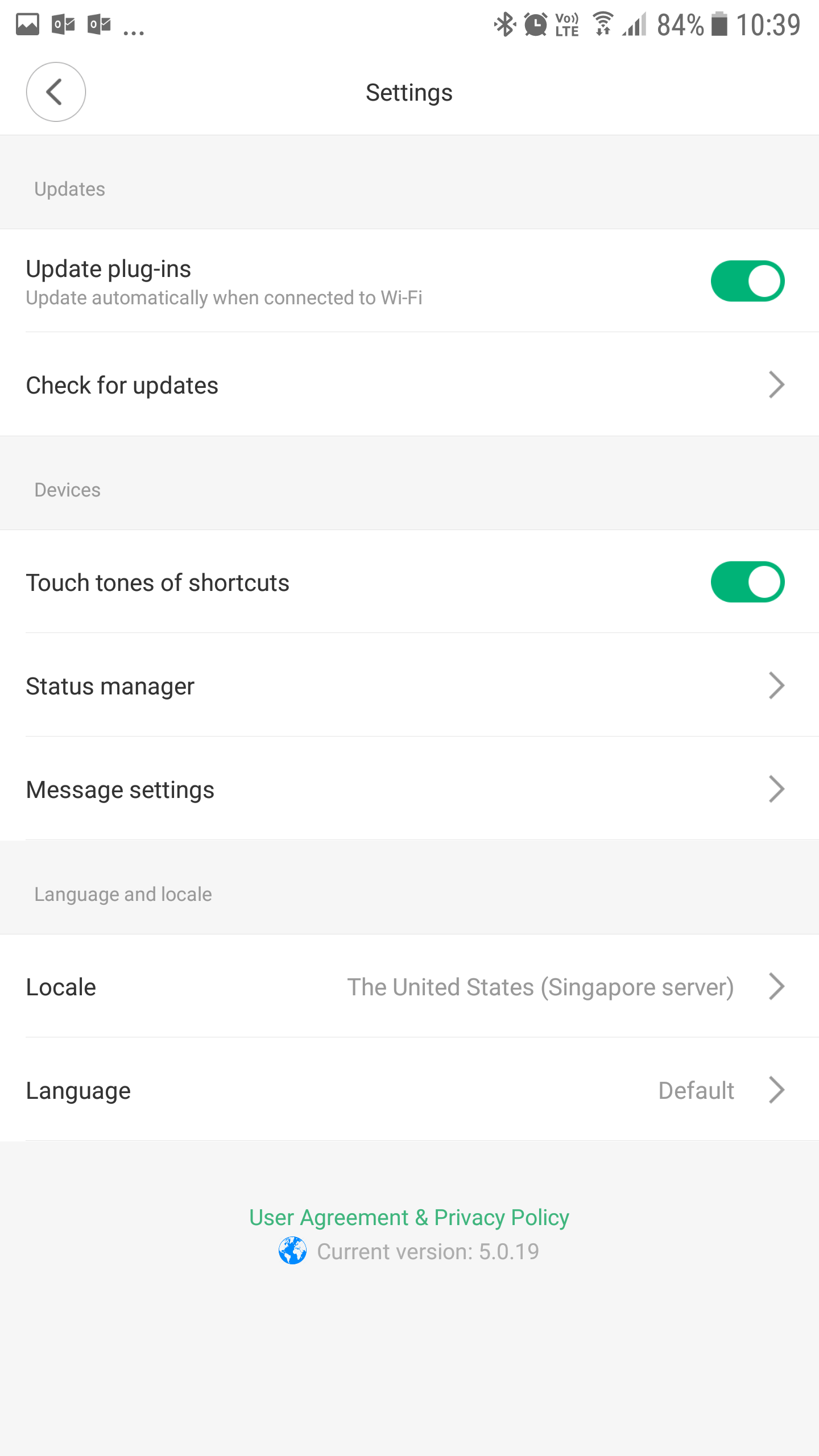
Sağ alt kısımdan Profile’a tıklayalım. Settings’e gelerek Locale kısmını “The United States (Singapore Server)” olarak değiştirelim.
Bu işlemi yaptıktan sonra yeniden giriş yapmanız gerekecek.
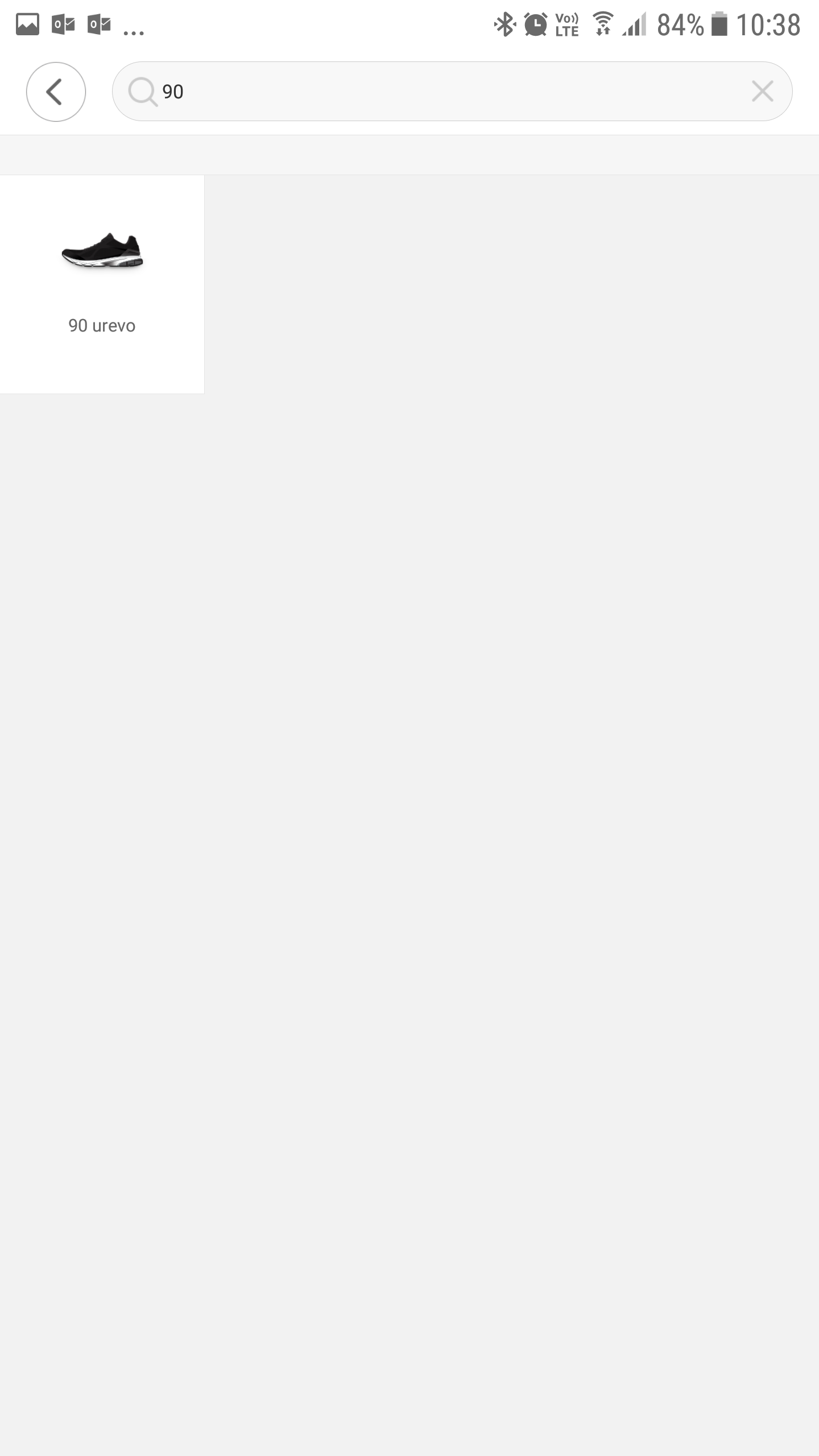
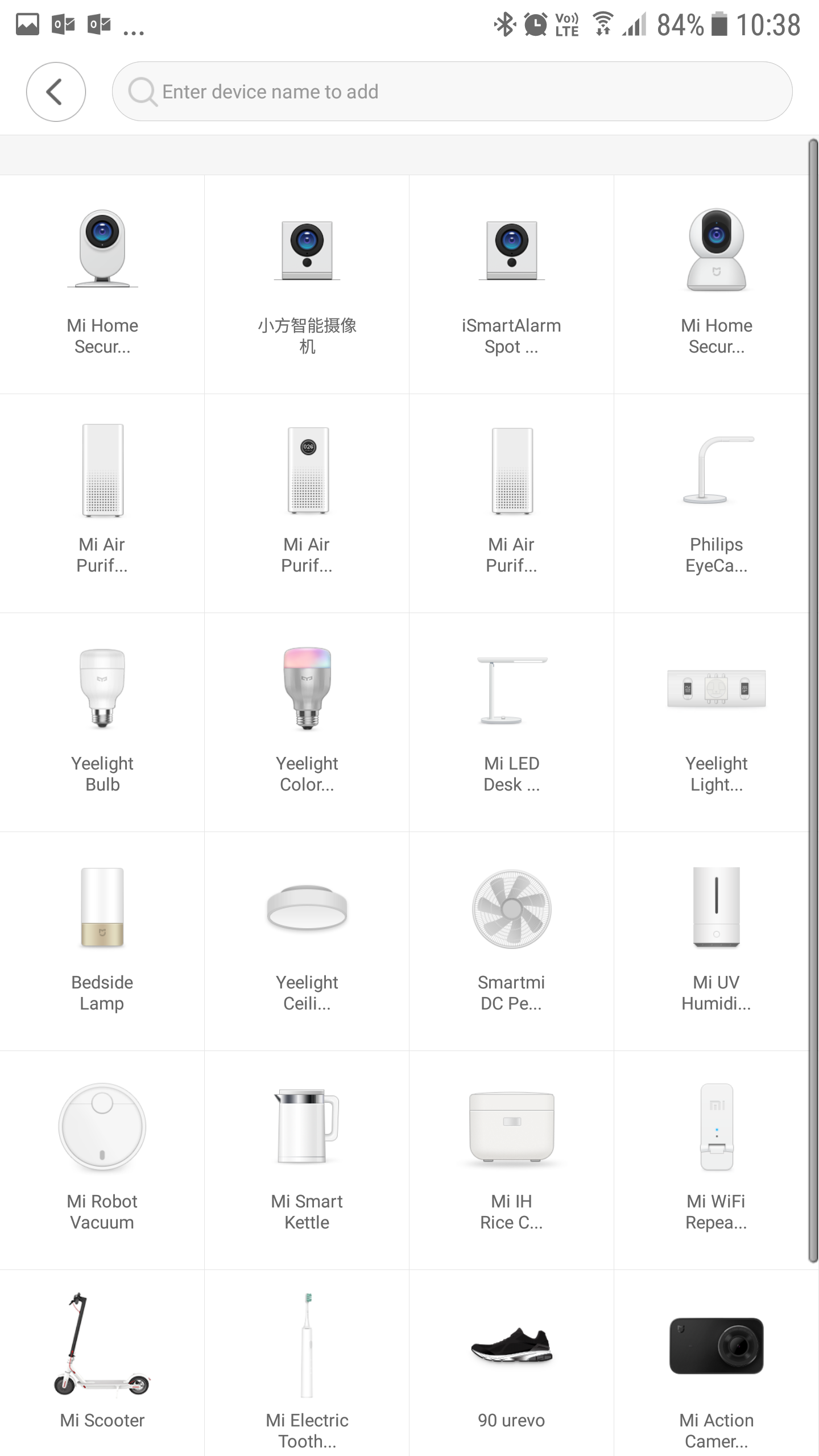
Giriş yaptıktan sonra cihaz ekleme kısmına gelelim. Cihazlar listesinde 90 Urevo’nun listelendiğini göreceksiniz.
Ekrandaki eşleştirme adımlarını takip ederek cihazımızı ekleyelim.
Ben server değiştirmeyi bulana kadar baya uğraştım. Siz uğraşmayın 🙂
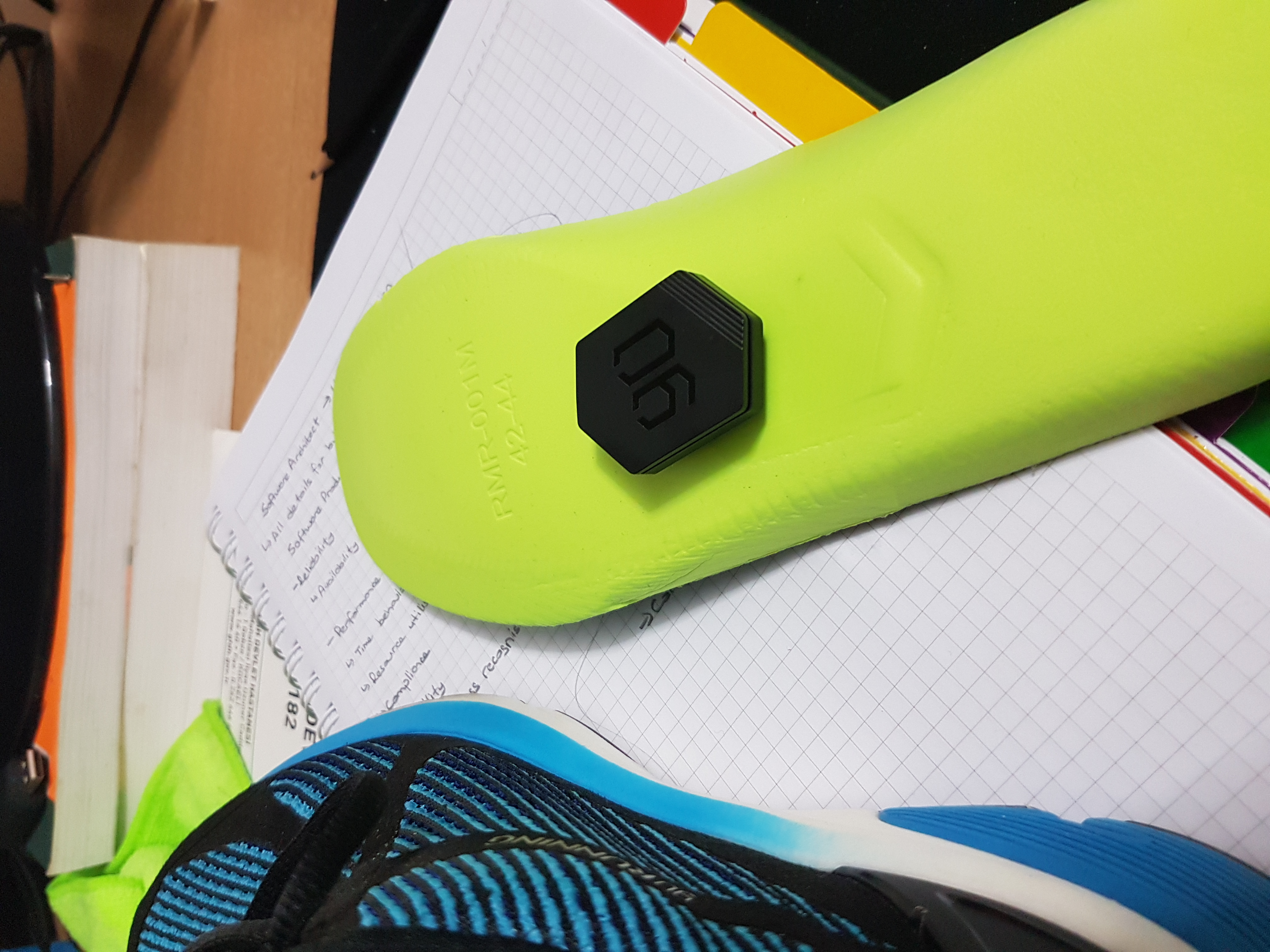
Bu arada çipi şarj ettikten sonra sağ ayakkabının tabanını çıkartarak kolayca yerleştirebilirsiniz.
Bugün en yaygın tasarım patternlerinden olan Singleton Pattern’inden bahsedeceğim. Singleton yazılım patterni Creational Design Patterns(Yaratıcı Tasarım Kalıpları) kategorisinde yer alır. Oluşturulan sınıfın sadece bir adet instance’ı olmasını garantiler. Tanımı kolay olmasına rağmen konu implementasyona gelince bir çok yöntem bulunmaktadır ve her zaman yazılımcılar arasında hangi yöntemin kullanılması gerektiği tartışmalı bir konudur. Burada singleton tasarım patterninin ilkelerinin neler olduğunu ve bu modeli uygulamak için kullanılan yöntemleri teker teker inceleyeceğiz.
Singleton tasarım patternine tüm örnek Java kodlarını aşağıdaki github reposunda bulabilirsiniz:
Bill Pugh Singleton Yöntemi (Bill Pugh Singleton Implementation)
1.Sabırsız Gerçekleme (Eager Initialization)
Bu yöntemde sınıfın instance’ı sınıfın yüklenme anında oluşur. Singleton patterninin en kolay implementasyonlarından biridir. Ancak instance, sınıfın yükleme anında oluştuğundan sınıf kullanılmasa bile instance oluşacağından gereksiz yer kaplar.
Bu yöntemle aşağıdaki gibi singleton patternini oluşturabiliriz:
package codegenius;
/**
*
* @author codegeni.us
*/
public class EagerInitialization {
// define private instance.
private static final EagerInitialization instance = new EagerInitialization();
//Restrict to create new instance.
private EagerInitialization(){
}
// use only created instance via public method.
public static EagerInitialization getInstance(){
return instance;
}
}
Eğer oluşturğunuz sınıf çok fazla kaynak tarafından kullanılmıyorsa bu yöntemi kullanabilirsiniz. Ancak genelde singleton sınıfları dosya sistemlerine erişim, loglama, veritabanı bağlantıları vs, kullanıldığı için sınıf çağrılmadan instance’ı oluşturmaktan kaçınmalıyız. Yukarıdaki yöntemde oluşacak bir exception’ı da ele almak imkansızdır.
2. Statik Blok Yöntemi (Static Block Initialization)
Statik blok yöntemi de aynı şekilde Eager yönteme benzer ancak aradaki fark oluşacak exceptionları ele alabiliriz. Yine sınıfın instance’ı sınıfın yüklenme anında oluşur. Ve bu az öncede söylediğimiz gibi çokta istediğimiz bir şey değil.
Örnek kod aşağıdaki gibidir:
package codegenius;
/**
*
* @author codegeni.us
*/
public class StaticBlock {
// define private static instance
private static StaticBlock instance;
// avoid create instance of class
private StaticBlock(){}
//static block that supports exception handling
static{
try{
instance = new StaticBlock();
}catch(Exception e){
// exception occured handle me.
throw new RuntimeException("Exceptions can be handled here." + e );
}
}
// global accessor method for instance.
public static StaticBlock getInstance(){
return instance;
}
}
3. Tembel Gerçekleme (Lazy Initialization)
Bu yöntem sınıfın instance’ı o sınıfa erişmek istenildiği anda oluşturulur. Eğer bu sınıfa birden fazla thread erişmiyorsa sorunsuz olarak çalışır. Birden fazla thread instance’ın oluşturulduğu yere aynı anda girerse farklı instance lar oluşur bu da singleton ilkesine aykırıdır. Farklı threadler olmadığı zaman bu yöntemde instance sınıfın yüklenme anında değil çağırılma anında oluştuğu için faydalıdır.
Örnek kod aşağıdaki gibidir:
package codegenius;
/**
*
* @author codegeni.us
*/
public class LazyInitialization {
// define private instance but don't create it.
private static LazyInitialization instance;
// avoid to create new instance of class
private LazyInitialization(){}
// global accessor for instance.
public static LazyInitialization getInstance(){
/** !!! be aware. This is not thread safe.If two or more threads try to
* access and creates the instance of the class at the same time.
* That time the Singleton pattern will be destroyed. */
if(instance == null){
instance = new LazyInitialization();
}
return instance;
}
}
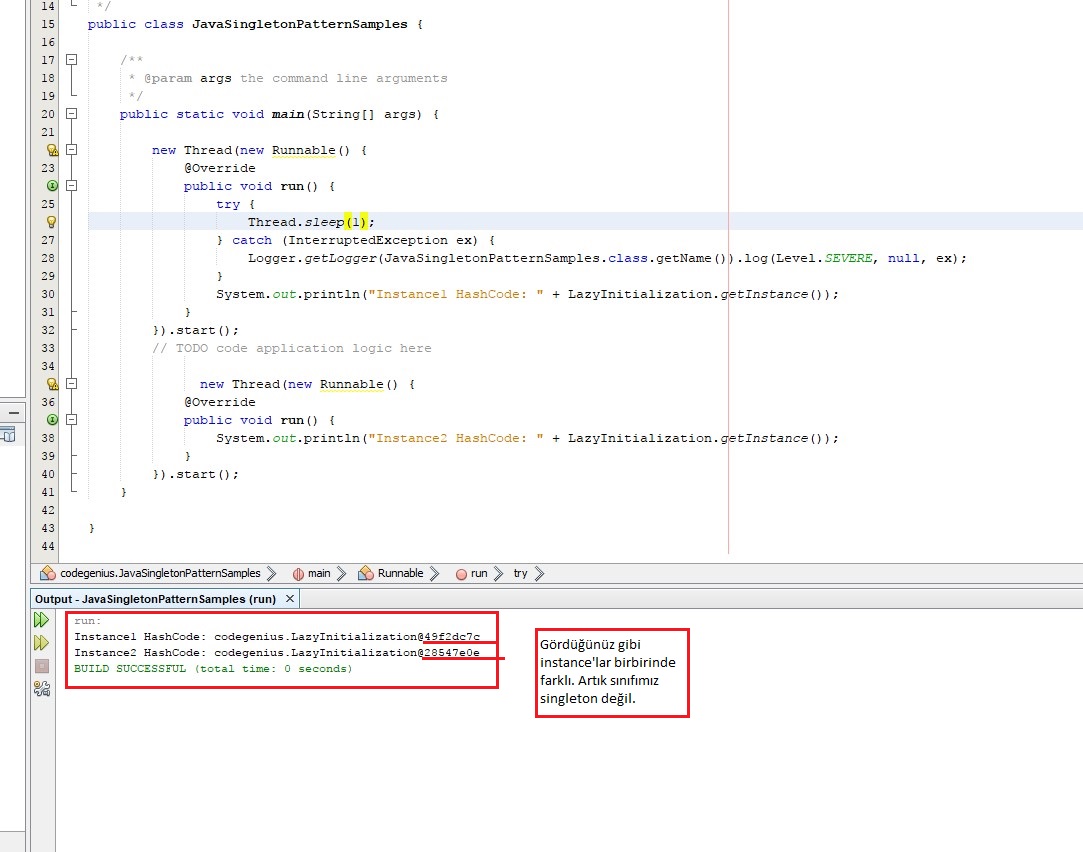
Bu yöntemi kullanırken birden fazla thread aynı anda ulaşırsa sorun olacağından bahsetmiştik. Aşağıdaki resimde iki thread singleton instance’ı oluşturuyor ve instance lar birbirinden farklı.
Lazy initialization failure.
4. Thread Safe Singleton
Az önceki örneğimizde sınıf instance’ı, sınıfın çağırılma anında oluşturularak implement edilen singleton patterninin nasıl thread safe olmadığını kanıtlamıştık. Şimdi lazy initialization yöntemini nasıl thread safe yapabileceğimize göz atalım.
Bunun en kolay yolu sınıfın global erişim metoduna synchronized koymaktır. Böylece metod herhangi bir thread tarafından çağırıldığı anda diğer threadler bu sınıfa erişemez ve birden fazla instance oluşturmanın önüne geçilmiş olur.
Örnek Java kodu:
package codegenius;
/**
*
* @author codegeni.us
*/
public class ThreadSafeSyncronized {
// define private instance
private static ThreadSafeSyncronized instance;
// avoid create instance of class from outside
private ThreadSafeSyncronized(){}
/** syncronize class method for avoid multiple access */
public synchronized static ThreadSafeSyncronized getInstance(){
if(instance == null){
instance = new ThreadSafeSyncronized();
}
return instance;
}
public void sampleMethodA(){
//do awesome stuff here.
}
public void sampleMethodB(){
// do awesome things here.
}
}
Yukarıdaki metodta birden fazla erişim engellenir ancak synchronized kelimesi sınıfın tamamını kitlediği için performans sorunu yaratır. Örneğin aşağıdaki gibi bir kullanımda sampleMethodA() ve sampleMethodB() fonksiyonları farklı metodlar olmasına rağmen farklı threadler tarafından aynı anda çağırılamaz. Çünkü getInstance’a koyduğumuz synchronized anahtar kelimesi tüm sınıfı kitler ve tek threadin kullanımına sunar. Bu da singleton yapısının bozulmamasını garantiler ancak performanssorunlarına sebep olur.
new Thread(new Runnable() {
@Override
public void run() {
ThreadSafeSyncronized.getInstance().sampleMethodA();
}
}).start();
new Thread(new Runnable() {
@Override
public void run() {
ThreadSafeSyncronized.getInstance().sampleMethodB();
}
}).start();
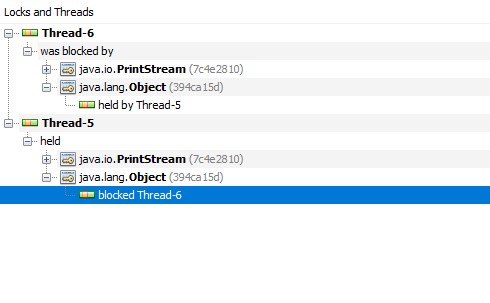
Yukarıdaki şekilde çağırdığımızda resimde görüleceği gibi threadlerin birbirini blokladığını görüyoruz.
thread block sample.
Thread safe singleton’a bir diğer yaklaşım ise double check yöntemidir. Bu yöntemde sadece instance oluşturulurken sınıf senkronize edileceğinden performans sorununa da yol açmaz.
package codegenius;
/**
*
* @author codegeni.us
*/
public class ThreadSafeDoubleCheck {
private static ThreadSafeDoubleCheck instance;
private ThreadSafeDoubleCheck() {
}
public static ThreadSafeDoubleCheck getInstance() {
if (instance == null) {
synchronized (ThreadSafeDoubleCheck.class) {
if (instance == null) {
instance = new ThreadSafeDoubleCheck();
}
}
}
return instance;
}
}
5. Bill Pugh Singleton Yöntemi
Java 5 ve öncesi bellek modelindeki problemden dolayı singleton sınıfına eş zamanlı erişilmeye çalışıldığında sorunlar ortaya çıkıyordu. Bu neden Bill Pugh yardımcı nested sınıf kullanarak singleton yapısı oluşturdu. Böylece sınıfın instance’ı yardımcı sınıfta tutuluyor. Sadece sınıf çağırıldığı zaman yardımcı sınıftan faydalanılarak instance çağrılıyordu. Böylece sınıfın yüklenme zamanında instance oluşmuyor sadece erişilmeye çalışıldığında oluşturuluyordu. Bu yöntemle geliştirilmiş singleton patterni aşağıdaki gibidir:
package codegenius;
/**
*
* @author codegeni.us
*/
public class BillPugh {
private BillPugh() {
}
private static class SingletonHelper {
private static final BillPugh instance = new BillPugh();
}
public static BillPugh getInstance() {
return SingletonHelper.instance;
}
}
Singleton sınıfı belleğe yüklendiğinde yardımcı inner sınıf belleğe yüklenmez. Sadece birisi getInstance metodunu çağırdığında yüklenir. Böylece senkronizasyon yapmaya da gerek kalmaz. Genelde en çok kullanılan java singleton patterni budur.
Linux üzerinde Go programlama ortamını kurmak için aşağıdaki adımları takip edelim.
1. Kurulum
Buradan en son go versiyonunu indirelim. (Yaklaşık 104mb)
İndirdiğimiz klasöre gelerek .tar dosyasını /usr/local içerisine aşağıdaki komutla açalım.
sudo tar -C /usr/local/ -xzf go1.9.1.linux-amd64.tar.gz
2. Ortam Değişkenlerini (PATH) Ayarlama
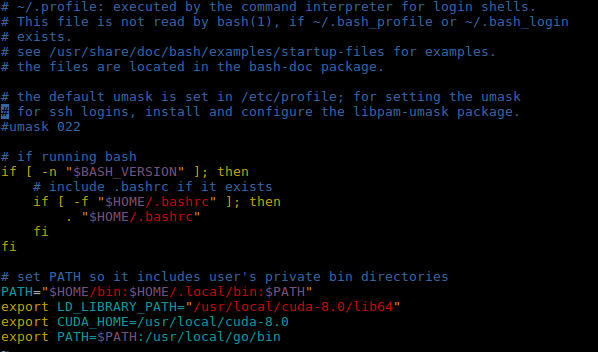
PATH ayarlarına go’nun kurulu olduğu yeri eklemek için $HOME/.profile dosyasını favori text editörünüzle açın.
sudo vim /home/codemania/.profile
export PATH=$PATH:/usr/local/go/bin kopyalayıp yapıştırın. Böylece path değişkenine go eklenmiş olacaktır.
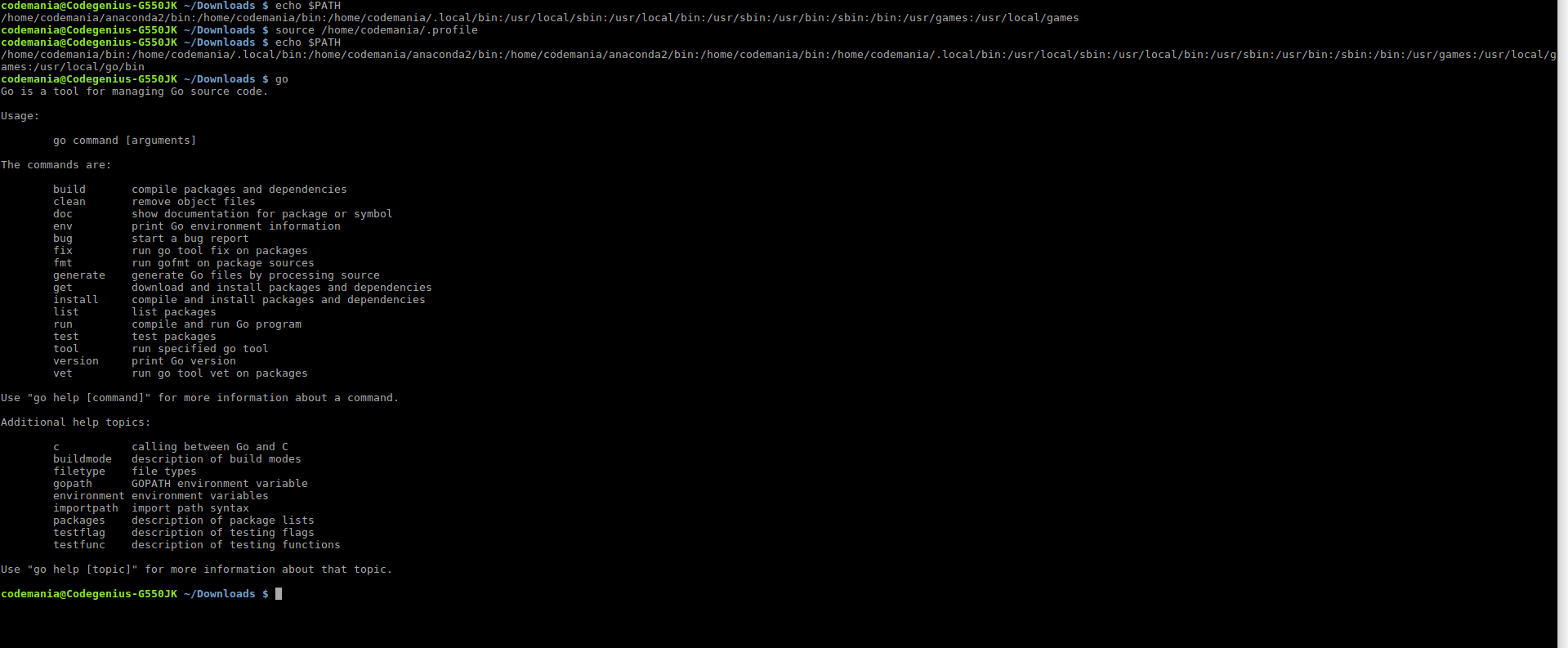
PATH değişkenine eklendiğini görmek için
source $HOME/.profile
echo $PATH komutlarını sırayla çalıştırın, eğer doğru şekilde eklediyseniz değişkenin sonuda /usr/local/go/bin/ görünecektir.
Sonrasında terminale go yazarak ortam değişkeninin çalıştığını gözlemleyebilirsiniz.
Önemli Not: Go’yu /usr/local içine açarsanız GOROOT değişkenini ayarlamanıza gerek yok. Başka yere kuracaksınız GOROOT ortam değişkenini de ayarlamayı unutmayın.
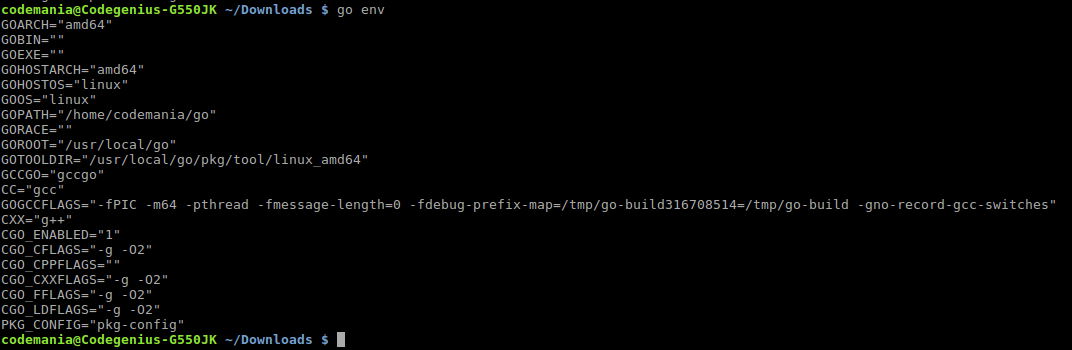
Bu kurulum sonucunda GOROOT ve GOPATH değişkenleri aşağıdaki gibi setlemiş olacak. Bu değişkenleri terminale go env yazarak görüntüleyebilirsiniz.
GOROOT = /usr/local/go
GOPATH = $HOME/$USER/go
Örneğin benim bilgisayarım için ortam değişkenleri:
Son olarak çalışma ortamımızı ayarlayalım.
mkdir $HOME/go komutunu çalıştıralım.
Böylece home dizinimizde go klasörü oluşturacağız.
3. Test
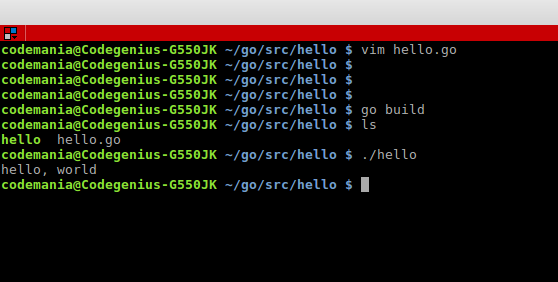
Kurulumu tamamladık. Şimdi “hello, world” diyelim.
Çalışma ortamımızın olduğu dizine gelelim. Biz o dizini $HOME/go olarak ayarlamıştık.
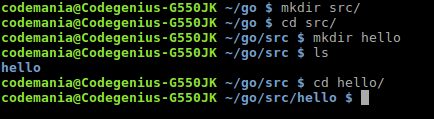
O dizinin altında aşağıdaki komutları uygulayarak src/ ve hello/ dizinini oluşturalım.
cd $HOME/go
mkdir src
cd src
mkdir hello
cd hello
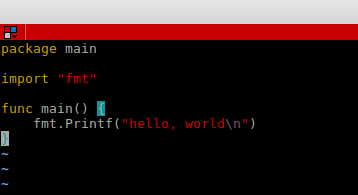
Favori text editörünüzü kullanarak aşağıdaki örnek kodu hello.go olarak kaydedelim.
package main
import "fmt"
func main() {
fmt.Printf("hello, world\n")
}
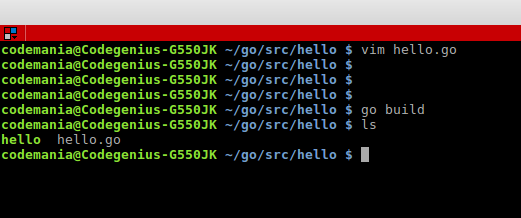
go build yazarak hello.go programımızı derleyelim. Sonucunda hello adında çalıştırılabilir dosya çıkacaktır.